Промышленность производство : Курсовая работа: Механізм важіля
Курсовая работа: Механізм важіля
МІНІСТЕРСТВО
ОСВІТИ І НАУКИ УКРАЇНИ
ЗАПОРІЗЬКИЙ
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
Кафедра ДМ та ПТМ
ПОЯСНЮВАЛЬНА ЗАПИСКА ДО
КУРСОВОГО ПРОЕКТУ З ДИСЦИПЛИНИ
ТЕОРІЯ МЕХАНІЗМІВ І МАШИН
З використанням ЕОМ
МЕХАНІЗМ ВАЖІЛЯ
Розробив
Ст. гр.
М-213 А.С. Щербина
Керівник
Асистент С.Ю. Кружнова
Запоріжжя
2005р.
Реферат
Об’єкт дослідження – механізм приводу конвеєра, його планетарній редуктор з
відкритою зубчатою передачею та кулачковій механізм із коливальним штовхачем.
Ціль роботи - синтез та аналіз механізму привода конвеєра.
У проекті вирішені такі задачі:
o
виконаний
структурний аналіз механізму;
o
зробленій
синтез важільного механізму за заданим коефіцієнтом зміни середньої швидкост
повзуна;
o
визначен
основні кінематичні та динамічні характеристики механізму, момент інерц
маховика та дійсний закон руху ланки зведення у вигляді його кутової швидкост
кутового прискорення;
o
знайден
реакції у кінематичних парах та зрівноважувальна сила;
o
створений
синтез зубчатої передачі, планетарного редуктора;
виконаний синтез кулачкового механізму з коливальним штовхачем.
Методи дослідження – графічний, графоаналітичний та аналітичний. Аналітичні методи
виконані також за допомогою ЕОМ. Кінетостатичне дослідження методами,
переліченими вище, та методом М.Є.Жуковського. Синтез зубчатої передачі та
кулачкового механізму виконано графічним та аналітичним методами.
ПЛАНИ ШВИДКОСТЕЙ, ПРИСКОРЕНЬ, СИЛА ТА МОМЕНТ СИЛИ ІНЕРЦІЇ, ЗВЕДЕНА СИЛА,
ЗВЕДЕНИЙ МОМЕНТ СИЛИ, ЗВЕДЕНИЙ МОМЕНТ ІНЕРЦІЇ, МАХОВИК, МОДУЛЬ, КОЕФІЦІЄНТ
ПЕРЕКРИТТЯ, КОЕФІЦІЄНТ ПИТОМОГО КОВЗАННЯ, КУЛАЧОК, ШТОВХАЧ, КУТ ТИСКУ, ФАЗОВІ
ДІАГРАМИ.
Робота виконана
на кафедрі ТМ І ТММ Запорізького національного технічного університету.
ВСТУП
Механізм конвеєра використовується у багатьох галузях виробництва для
переміщення виробів під час технологічної обробки, складання, контролю тощо.
Створення сучасної машини вимагає від конструктора всебічного аналізу
проекту. Конструкція повинна задовольняти багатьом умовам, які можуть бути у
протидії одна до одної. Наприклад, мінімальна динамічна завантаженість повинна
узгоджуватись зі швидкохідністю, достатня надійність і довговічність повинна
бут забезпечена при мінімальних габаритах і масі. Витрати на виготовлення та
експлуатацію повинні бути мінімальними, але забезпечувати досягнення заданих
параметрів. З великої кількості можливих рішень конструктор вибирає компромісне
рішення з визначеним набором параметрів і проводить порівняльну оцінку різних
варіантів. Зараз усі розрахунки виконують за допомогою ЕОМ, що дає можливість
оцінювати конструкцію за багатьма критеріями якості і знайти максимум
показників якості й ефективності.
Виконання усіх стадій проектування у визначений термін часу неможливо
здійснити без втілення методів автоматизованого проектування машин. Навички
роботи з ЕОМ використовується у роботі над курсовим проектом з ТММ. Тут
використовуються такі програми:
-
програма
розрахунків для важільних механізмів другого класу;
-
програма
розрахунків параметрів зубчатого зачеплення;
-
програма
проектування планетарних редукторів;
-
програма
проектування кулачкових механізмів;
-
програма
тестового контролю знань студентів.
Основним є володіння аналітичними, графоаналітичними та графічними
методами дослідження механізмів, оцінка отриманих результатів особливо з точки
зору якісних показників. Це і є метою роботи.
1. СТРУКТУРНИЙ АНАЛІЗ МЕХАНІЗМУ
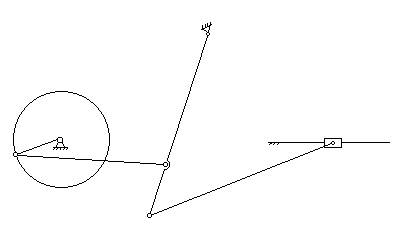
Схема механізму та вхідні дані для
дослідження наведені в додатку 1, рисунок 1[14], вариант 5.
О2
3
1 О1
5
А 2
В Д
4
С
Рис
1.1.Механізм важіля
Механізм важіля
складається з п’яти ланок, де ланка 1- вхідна і ланка 5- вихідна (повзун).
Визначемо основні типи ланок, характер руху, клас і назву кінематичних пар.
Результати заносимо в таблицю 1.
Таблиця 1.
Характристика ланок і кінематичних пар.
| Ланки механізму |
| Позначення |
Назва ланки |
Характер руху |
| 0 |
Стійка, корпус, станина |
Нерухомий |
| 1 |
Кривошип |
Обертальний |
| 2 |
Шатун |
Плоский |
| 3 |
Коромисло |
Обетальний |
| 4 |
Шатун |
Плоский |
| 5 |
Повзун |
Поступальний |
|
Кількість рухомих ланок механізму n=5
|
| Кінематичні пари (КП) |
|
Позна-
чення
|
Характер відносного руху ланок, що
утворюють КП |
Номера ланок, що утворюють КП |
Клас пари |
|
O1
|
Обертальна |
0, 1 |
5 |
| А |
Обертальна |
1, 2 |
5 |
|
О2
|
Обертальна |
0, 3 |
5 |
| В |
Обертальна |
2, 3 |
5 |
| С |
Обертальна |
3, 4 |
5 |
| Д |
Обертальна |
4, 5 |
5 |
|
Д1
|
Поступальна |
0, 5 |
5 |
|
Кількість КП 5-го класу р5=7,
4-го класу р4=0
|
Усі КП механізму
плоскі і дозволяють відносний рух ланок тільки в одній площині, тому весь
механізм плоский.
Ступінь вол
визначемо за формулою Чебишева:
W = 3n - 2p5 - p4 = 3*5 - 2*7 – 0 = 1.
Групи Ассура
(нульові групи)показані на рисунку 1.2 у порядку їх відокремлення.
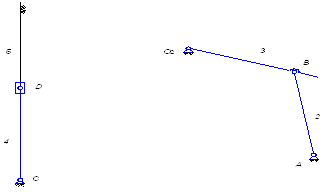
Рис. 1.2. Групи Ассура другого класу
другого порядку
Найвищій клас груп Ассура – другий,
одже і увесь механізм другого класу.
2.
СИНТЕЗ МЕХАНІЗМУ ВАЖІЛЯ
Для синтезу
механізму задані такі дані: довжини ланок 1-4 -01А=115мм, АВ=291мм,
О2В=232мм, О2С=290мм, СД=319мм, О1О2=338мм,
відстань L6=271мм, а також кути крайніх положень
ланки 3.
Треба визначити
кут перекриття θ та коефіціент зміни середньої швидкості k.
Так як відомі розміри усіх ланок, то можна
побудувати два крайніх положення механізму. Знайдемо кут перекриття з
трикутника 01В1В2 .

θ=6о 71′
Звідси знаходимо
коефіціент зміни середньої швидкості:

Креслення
виконуємо з масштабним коефіціентом μ=0,004. Тобто
О1А=lO1A/μ=0,115м/0,004=28,75мм
АВ=72,75мм
L6=67,75мм
О2С=72,5мм
О2В=58мм
Н=72,5мм
3 ВИЗНАЧЕННЯ ФУНКЦІЙ
ПОЛОЖЕННЯ
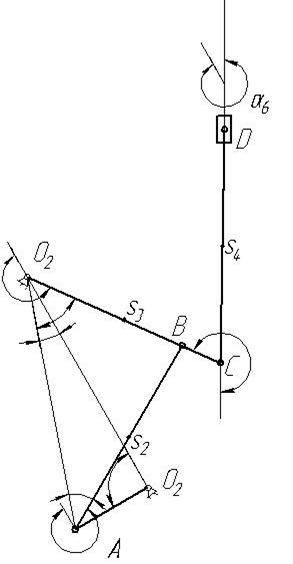
Зобразимо
заданий механізм у вигляді замкнутого векторного многокутника. Визначимо
допоміжні кути γі.

α2=2π - γ1
γ3 =336,80
α3=π
+ γ2 – γ1 =173,40
α6=2π
arcSin(L1’/L0)=329,020
α31=
α3 + 2π - α6 =204,380
α4=arcSin((l31·sin
α31
l6)/l4 =359.210
l5=l31·cos
α31+l4·cos α4=0.217 м
4 ВИЗНАЧЕННЯ ПЕРЕДАТОЧНИХ
ФУНКЦІЙ МЕХАНІЗМУ
Використаємо формули визначення передаточних функцій з урахуванням формул
переходу для положення механізму, коли α1=900.
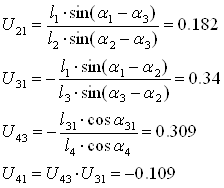
Передаточні функцій Vqx2, Vqy2, Vqx3, Vqy3, Vqx4, Vqy4, VqD5 знайдемо за формулами:
Vqx2=-(l1·sinα1+lAs2·sinα2·U21)=0,04 м
Vqy2=l1·cosα1+lAs2·cosα2·U21=-0,08714 м
Vqs2=0.09588 м
Vqx3=- lO2s3·sinα3·U31=-0,00582 м
Vqy3=lO2s3·cosα3·U31=0.05027 м
Vqs3=0.0506 м
Vqx4=-(l31·sinα31+lCs4·sinα4·U41)=0,00024 м
Vqy4=l31·cosα31+lCs4·cosα4·U41=0,07486 м
Vqs4=0,07486 м
Vqs5=-(l31·sinα31·U31+l4·sinα4·U41)=-0,04227м
5
ГРАФІЧНЕ
ВИЗНАЧЕННЯ ПЕРЕДАТОЧНИХ ФУНКЦІЙ
Креслимо механізм
у заданому положенні (α1=900) у масштабі. З точки О1 проводимо
паралельно ланці 3 лінію до пересічення з лінією ланки2 або ії продовженням.
Точка пересічення позначена літерою N. З точки О2 проведемо лінію перпендикулярну до
лінії руху повзуна 5 (точки Д).
U21=AN/AB=0,179
U31=O1N/O2B=0,349
U43=CN1/CD=0,319
U41= U43· U31=0,111
VqD3=O2N1=0,271 м
VqD1= VqD3·
U31=0.096 м
Похибка при
визначенні передаточних функцій між графічним та аналітичним методами:
U21(%)=
U31(%)=
U41(%)=
VqD1(%)=
Значення
передаточних функцій, Визначенних за допомоги ЕОМ наведені в додатку .
6
ВИЗНАЧЕННЯ ЗВЕДЕНИХ МОМЕТІВ
СИЛ КОРИСНОГО ОПОРУ
Так як в
положенні механізма з α1=1950 сила корисного опору на повзун Рко=5200(холостий
хід), то і зведений момент сил опору
Мзо= Рко* VqD1=5200*0.096=499.2Hм.
Але ж цей момент
не постійно має таке значення, тому побудуємо діаграму залежності |Mзо, α1| за результатами розрахунку на ЕОМ. Далі будуємо діаграму
робіт корисного опору |Азо, α1|.
За повний цикл Азо=Азр,
тобто робота зведених сил опору рівна роботі зведених рушійних силю. Вважаємо
зведений момент рушійних сил постійною величиною. Тоді діаграма зведених
рушійних сил буде прямою лінією, яка з’єднує початок та кінець діаграми робіт
зведених сил опору. Виходячи з цього, запишемо:
Мзр=Азо(360)/2π=860/2π=136,9
Н·м
Віднімаючи з
ординат діаграми Азр ординати діаграми Азо, будуємо
діаграму ΔТ=Азр-Азо для всіх положень кривошипа.
7 ВИЗНАЧЕННЯ ЗВЕДЕНИХ
МОМЕНТІВ ІНЕРЦІЇ ЛАНКИ ЗВЕДЕННЯ
Зведені момети інерц
ланки зведення визначаємо за формулою:
 Для положення α1=900: Для положення α1=900:
IЗ=18·0.07592+0,1421·0,32262+19·0.0357252+0,149·0,25522+21х
х0.0672432+0,1992·0,092552+15·0.0659122=0,3567 кГм2
Відхилення від
розрахунку на ЕОМ (Ip=0.3632 кГм2) не перевищу
5% (1,7%). Використовуючи результати аналітичного розрахунку за допомогою ЕОМ,
будуємо діаграму |I3, α1|, попередньо повернувши ос
на 900.
8 ВИЗНАЧЕННЯ МОМЕНТУ ІНЕРЦІЇ МАХОВИКА МЕТОДОМ ВІТТЕНБАУЕРА
Графічно
виключаючи параметр α з
діаграм |ΔT, α1| та |I3, α1|, будуємо діаграму |ΔT, I3| - енергомас. Визначемо кути ψmax та ψmin дотичних до цієї діаграми.


Поводимо дотичн
під цими кутами до діаграми енергомас до їх пересічення з віссю ΔТ.
Отриманий відрізок аb=108,78мм.
Момент інерц
маховика

Згідно розрахунку
за методом Гут’яра за допомогою ЕОМ І’m=11,05 кГм2.
Похибка не перевищує 5%.
9 ВИЗНАЧЕННЯ РОЗМІРІВ МАХОВИКА
Визначемо потужність рушійних сил
P’=Mзр·ω1=136,9*42,9=5873,01
Вт
Задана частота обертання ротора
двигуна nдв=1500 хв-1.
Потужність на валі електродвигуна
Рр=P’/η=5873,01/0,7=8390 Вт
За цією потужністю та частотою
обертання вибираємо електродвигун RAM71B4, для
якого Рр=0,37 кВт та nд=1500 хв-1. Момент інерції ротора цього
електродвигуна Ір=0,0011 кГм2.
Враховуючи, що робота парової машини
має безударний характер, ставимо маховик на валі електродвигуна. Тоді зведений
до вала двигуна момент інерції маховика

Маховик виконуємо у вигляді диска.
Матеріал маховика – чавун, для якого ρ=7100кг/м3. Діаметр
маховика
 0,38325 м=383,25мм 0,38325 м=383,25мм
Ширина маховика В=ψb·D=0,3·383,25 мм=114,975 мм
Діаметр посадкового отвору
d≥(7...8)· =7,5· =7,5· =8· =8· =10.6 мм =10.6 мм
Приймемо d=12мм.
10 ГРАФО-АНАЛІТИЧНИЙ МЕТОД
КІНЕМАТИЧНОГО
АНАЛІЗУ МЕХАНІЗМА
10.1
Визначення
швидкостей графоаналітичним методом
Визначемо
швидкість точки А, яка належить вхідній ланці 1. Кутова швидкість ланки 1 у
положенні, заданому кутом α1=1950, становить
ω1=2π*nOA=2*3.14*6,833 c-1=42,9 рад/с.
Звідси
VA= ω1*lOA=42,9 c-1*0.115 м=4,935 м/с.
Вектор  напрямлений перпендикулярно
до ланки ОА в бік обертання кривошипу. напрямлений перпендикулярно
до ланки ОА в бік обертання кривошипу.
Приймаємо довжину
відрізка pa=70мм,
що зображує вектор  , і визначемо масштабний коефіціент , і визначемо масштабний коефіціент
 4,935/70=0,07мс-1/мм 4,935/70=0,07мс-1/мм
З довільно
обраного полюса р на площині (див. аркуш 2), перпендикулярно до
ланки ОА проводимо відрізок ра.
Швидкість точки В
визначемо, виходячи з теореми про швидкість точки твердого тіла у плоскому
русі:

В цьому
векторному рівнянні  та та  . .
Вказане векторне
рівняння розв’язуємо графічно. Для цього з
точки а плану швидкостей проводимо лінію перпендикулярну ланці АВ
до пересічення з лінією, проведеною з точки р перпендикулярно
ланці О2В. Точку пересічення позначимо як b. Помноживши відрізки ab та pb на масштабний коефіціент μV, отримаємо величини
швидкостей
VB=pb* μV=49,17*0,07=3,44мс-1,
VBА=ab* μV=31,65*0,07=2,22мс-1
Розмір відрізка рс,
що зображує на плані швидкість точки С, визначемо з пропорції:
рс=pb*1,25=61,46мм
VC=pc* μV=4,3022мc-1
Швидкість точки Д
знайдемо, розв’язуючи графічно векторне
рівняння:
Тут вектор VД | | х-х,  . .
З точки с
плану швидкостей проведемо лінію перпендикулярну ланці ДС до пересічення з
лінією, проведеною з точки р, паралельно вісі х1 – х1.
Точка пересічення позначена як д.
VД=рд* μV=57,5*0,07=4,025мс-1,
VДС=дс* μV=21,63*0,07=1,51мс-1.
Положення точок S2, S3, S4 , які є центрами ваги ланок,
знайдемо на серединах відрізків ав, рс та сд. З’єднаємо
точки S2, S3, S4 з полюсом плана і отримаємо
відрізки рS2, рS3, рS4, що зображують швидкості центрів
ваги ланок.
VS2=pS2* μV=58,38*0,07=4,087мс-1,
VS3= рS3* μV=30,73*0,07=2,151мс-1,
VS4= рS4* μV=58,52*0,07=4,096мс-1.
Розрахунок кутових
швидкостей ланок розглянемона прикладі ланки 2, величина кутової швидкост
якої
 7,629 с-1 7,629 с-1
Кутова швидкість ω2
направлена проти руху годинникової стрілки, тому що вектор відносної швидкост
ланки АВ, уявно перенесений у точку В ланки 2, прагне повернути ланкку проти
руху годинникової стрілки відносно точки А.
Аналогічно
визначаємо велечини і напрямок ω3, ω4.
 14,828 с-1 14,828 с-1
 4,734 с-1. 4,734 с-1.
Напрямки кутових
швидкостей показані на кресленні (див. арк. 2)
10.2
Визначення прискорень
графо-аналітичним методом
Будуємо план
прискорень для положення механізму, заданого кутом α1=1950.
Рух ведучої ланки АВ здійснюється з постійною кутовою швидкістю ω1=42,9
с-1.
Прискорення точки
А кривошипа 1:

де нормальне прискорення
 = 211,6 мс-2 = 211,6 мс-2
тангенциальне:
 0 0
Повне прискорення точки А кривошипа
 =211,6мс-1 =211,6мс-1
Вектор аАО1 направлений
вздовж ланки О1А від точки А до О1.Прий мемо довжину
відрізка πа=121мм і визначемо масштабний
коефіціент побудови плана прискорень.
μа= =211,6/121= 1,75 мс-2/мм =211,6/121= 1,75 мс-2/мм
З довільно обраного центра π
плана прискорень проведемо лінію у напрямку вектора  відкладемо на ньому відрізок πа.
відкладемо на ньому відрізок πа.
Для визначення прискорення точки В
запишемо векторне рівняння складання прискорень точки твердого тіла у плоскому
русі:
 . .
Тут  - нормальнее прискорення точки В відносно точки А, яке має напрямок
від точки В до точки А. - нормальнее прискорення точки В відносно точки А, яке має напрямок
від точки В до точки А.
 7,6292*0,291=16,937мс-1, 7,6292*0,291=16,937мс-1,
an2= / μa=9,678мм. / μa=9,678мм.
Вектор  - тангенциальне прискорення
точки В відносно точки А, яке має напрямок перпендикулярний нормальному, але
модуль його невідомий. - тангенциальне прискорення
точки В відносно точки А, яке має напрямок перпендикулярний нормальному, але
модуль його невідомий.
Вектор  - нормальне прискорення
точки В відносно точки О2 , яке має напрямок від точки В до точки О2. - нормальне прискорення
точки В відносно точки О2 , яке має напрямок від точки В до точки О2.
 =51,01мс-2, =51,01мс-2,
πn3= /μa=29,149мм. /μa=29,149мм.
З точки n2 проведемо лінію у напрямку вектора  до пересічення з лінією,
проведеною з точки n3 у напрямку вектора до пересічення з лінією,
проведеною з точки n3 у напрямку вектора  .
Точку пересічення позначемо b і з’єднаємо її з полюсом π. .
Точку пересічення позначемо b і з’єднаємо її з полюсом π.
Величини
тангенціальних прискорень:
 =n2b*μa=87,84*1,75=152,95 мс-2, =n2b*μa=87,84*1,75=152,95 мс-2,
 =n3b*μa=81,4*1,75=142,45мс-2. =n3b*μa=81,4*1,75=142,45мс-2.
Кутов
прискорення ланок:
ε2= /lAB=525,6 рад/с2, /lAB=525,6 рад/с2,
ε3= /lBO2=614 рад/с2. /lBO2=614 рад/с2.
Напрямки кутових
прискорень показані на креслені (див. арк. 2).
Прискорення точки
С знайдемо, базуючись на теорему подібності, з пропорції
 ; Звідси ; Звідси
 =0,29*86,46/0,232=108,075
мм. =0,29*86,46/0,232=108,075
мм.
 =108,075*1,75 = 189,13 мс-2 =108,075*1,75 = 189,13 мс-2
Прискорення точки
Д визначимо, вирішивши графічно векторне рівняння:
Тут вектор  - нормальне прискорення
точки Д у відносному русі навколо точки С. Цей вектор напрямлений від точки Д
до точки С. - нормальне прискорення
точки Д у відносному русі навколо точки С. Цей вектор напрямлений від точки Д
до точки С.
 =4,7342*0,319=7,149 мс-2 =4,7342*0,319=7,149 мс-2
  -
тангенційне прискорення точки Д відносно точки С. -
тангенційне прискорення точки Д відносно точки С.
З точки с
плану прискорення у напрямку вектора  проводимо
промінь, на якому відкладаємо проводимо
промінь, на якому відкладаємо
cn4= /μa=7,149/1,75=4,085 мм. /μa=7,149/1,75=4,085 мм.
З точки n4 проведемо лінію, перпендикулярну
ланці СД, до пересічення з лінією, проведеною з полюса π паралельно вісі х1-х1.
Точку пересічення позначемо д.
аД=πд*μа=112,14*1,75=196,245
мс-2.
 =n4д* μа=1,69*1,75=2,958мс-2. =n4д* μа=1,69*1,75=2,958мс-2.
Кутове
прискорення ланки 4
Положення центрів
ваги на плані прискорень показуємо на серединах відрізків повних відносних
прискорень.
Прискорення
центрів ваги:
аs2=πS2*μa=95,42*1,75=166,985мс-2
,
аs3=πS3*μa=54*1,75=94,5мс-2
,
аs4=πS4*μa=109,72*1,75=192,01мс-2.
аs5= aД=196,245 мс-2
11 КІНЕМАТИЧНІ ДІАГРАМИ РУХУ
ТОЧКИ
Згідно з
аналітичним розрахунком будуємо діаграму переміщень. Кути повороту кривошипа
відкладаємо вздовж вісі абсцис з масштабним коефіціентом μα=2
град/мм = π/90 рад/мм.
Масштабний коеф.
часу µt = 60/(410*180) = 0,0015 с/мм.
Вдзовж віс
ординат відкладаємо значення переміщень точки Д, взятих з розрахунку на ЕОМ з
масштабним коефіціентом
µs= 0.003 м/мм.
Методом
графічного диференціювання будуємо діаграму швидкостей точки Д.
Для цього на від’ємному продовженні вісі абсцис
відкладаємо полюсну відстань Н1= 24 мм з полюсом рV. Поділимо відрізок L=180мм на 12 рівних частин та
відновимо ординати на кінцях кожної частини. З полюса проведемо промені,
паралельні хордам на кожній частині графіка переміщень, до пересічення їх з
віссю ординатю Значення ординат переносимо на середину відповідних частин.
Отримані точки значень середніх швидкостей на всіх ділянках з’єднуємо плавною лінією. Це і буде
діаграма швидкостей точки Д. Для порівняння побудуємо діаграму швидкостей за
розрахунком на ЕОМ. Масштабний коефіціент:
µV=µs/(H1·µt) = 0.003/(24*0,0015)=0.082мс-1/мм.
Таким же чином
диференціюємо діаграму швидкостей для побудови діаграми прискорень точки Д.
Полюсна відстань Н2 = 16 мм. Та також перевіряємо отриману діаграму
за допомоги розрахункових даних на ЕОМ (пунктирною лінією). Масштабний коеф.
прискорення:
µа=µV/(H2·µ1)=0.082/(16·0.0015)=3.41 мс-2/мм.
12 КІНЕТОСТАТИЧНЕ ДОСЛІДЖЕННЯ
МЕХАНІЗМУ
12.1 Визначення сил, що діють на механізм
На ланки механізму діють такі сили: ваги, інерції, корисного опору,
моменти сил інерції, реакції в’язів та зрівноважуюча сила або момент сили. З
цієї системи сил тільки реакції в’язів та зрівноважуюча сила або момент сили не можуть бути визначені з
даних, що вже є.
Сили ваги
G2=m2·g=19*9,81=186,39 H
G3=m3·g=24*9.81=235,44 H
G4=m4·=29*9.81=284,49H
G5=m5·g=190*9.81=1863,9 H
Моненти інерції ланок:



Сили інерції:




Моменти сил інерції:



12.2
Графоаналітичний
метод силового розрахунку механізму важіля
Графоаналітичний метод силового аналізу проводиться по групах Ассура.
Досліджуємо сили, що діють на групу Ассура, складену з ланок 4 та 5
(див арк. 2) і у відповідальних точках прикладаємо зовнішні сили.
У графоаналітичному методі сили інерції і момент сили інерції замінюємо
однією рівнодіючою, яка за величиною дорівнює силі інерції, співпадає з нею за
напрямком, а точка прикладання знаходиться на відстані hi таким чином, щоб момент
рівнодіючої сили відносно центра ваги співпадав за напрямком з моментом сили
нерції.
Для ланки 4
Переносимо на креслення (арк. 2) з масштабним коефіціентом μ=0,0025;  = 0,0049/0,004
= 0,123 мм = 0,0049/0,004
= 0,123 мм
Реакції в кінематичних парах прикладаємо у вигляді двох складових, як
напрямлені вздовж та перпендикулярно ланці. Для поступальної кінематичної пари
направляюча – повзун, тому реакцію прикладаємо перпендикулярно направляючій.
Складаємо рівняння рівноваги для кожної ланки групи Ассура окремо

З креслення визначемо плечі сил:
СД = 0,319 м


Для усієї групи Ассура складаємо векторне рівняння рівноваги:

Згідно цього
рівняння складаємо силовий багатокутник.Вибираємо масштабний коефіціент μF=77 Н/мм.
Визначаємо інші реакції ( R05 та  ): ):
R05 = 0 Н
 = =   =7716,39Н =7716,39Н
R34=7716,39 H
Досліджуємо сили, що діють на группу
Асура, складену з ланок 2 та 3 (див. аркуш 2) і у відповідних точках
прикладаємо відповідні сили.
Сили та моменти сил інерції замінюємо
рівнодіючими, які за величиною рівні силам інерції і прикладені на відстані  та та  : :
З урахуванням масштабного
коефіціента μ=0,0025 знаходимо плечі рівнодійних на кресленні:
Складаємо рівняння моментів сил, що
діють окремо на ланки 2 і 3 відносно точки В і визначаємо тангенціальн
складові реакцій.
Для ланки 2:
 , ,
де h2 = 0,117 м,
АВ = 0,291 м,
 . .
І звідси :

Для ланки 3:

де О2В = 0,29 м,
h3 = 0,147 м,
 , ,
 . .
І звідси :
 Запишеио векторне
рівняння рівноваги сил, що діють на групу Ассура, складену з ланок 2 і 3. Запишеио векторне
рівняння рівноваги сил, що діють на групу Ассура, складену з ланок 2 і 3.
 . .
Будуємо план сил відповідно до цього
рівняння і визначаємо величини та напрямки реакцій  (див.
арк. 2). Знайдемо довжини векторів сил на кресленні з масштабним коефіціентом μF=0,007Н/мм. (див.
арк. 2). Знайдемо довжини векторів сил на кресленні з масштабним коефіціентом μF=0,007Н/мм.
Визначаємо з креслення :




Розглянемо рух вхідно
ланки. Вхідною ланкою механізму є кривошип 1, який здійснює обертальний
рух. Привод у рух цієї ланки здійснюється від електродвигуна через планетарний
редуктор і відкриту зубчату передачу коліс 4 і 5. Ланка 1 виконується разом з
колесом 5, або жорстко з нею зв’зуються.
На зубчате колесо з боку спряженого колеса 4 діє сила, яку називають
зрівноважуючою, або рушійною. Накреслимо ведучу ланку разом з колесом 5 (див.
аркуш 2).
Число зубів
колеса 5 Z5 = 35, колеса 4 Z4 = 16, а модуль зубчатих колес m = 8 мм. З цих даних знайдемо радіусb колес 5 і 4:
r5 = m × Z5 / 2 = 140 мм.
r4 = m × Z4 / 2 = 64 мм.
Зрівноважуючу силу Рзр Прикладаємо в полюс
зачеплення коліс і 5 і направимо по лінії зачепленя, яка складає з дотичною до
початкових кіл кут приблизно aw = 24°.
В точці А
кривошипа прикладаємо силу реакції R12 з боку ланки 2. Величину та
напрямок цієї реакції визначаємо з рівності  . .
Запишемо векторне
рівняння рівноваги сил, що діють на вхідну ланку:
 . .
Будуємо силовий трикутник відповідно
векторного рівняння, з якого візначаємо сили Рзр і R01 ( масштабний коефіціент виберемо
рівним μF=77Н/мм
). Тоді
З креслення визначаємо:
Fзр = 41,78*77=3217 Н,
R01 = 63,44*77=4484,88 Н.
13 ВИЗНАЧЕННЯ ЗРІВНОВАЖУЮЧОЇ
СИЛИ МЕТОДОМ
«ВАЖІЛЯ» ЖУКОВСЬКОГО
Побудуємо план швидкостей, повернутий на 900 проти руху
кривошипа (див. арк. 2)
В центрах ваги прикладаємо сили ваги, в точках прикладання рівнодіючих
сил інерції прикладаємо ці сили, а в точці р під кутом 240
до нормалі до ррV зрівноважуючу силу Рзр.
Точки прикладання рівнодіючих сил інерції поділяють відповідні відрізки
швидкостей у тій же пропорції, у якій поділяють ланки точки Кі.
Згідно теореми Жуковського розглядувана система сил перебуває у стан
рівноваги. Складаємо рівняння моментів сил, діючих на ”важіль”, відносно полюсу
рV.
G2·116,6 + G3·50.45 + G4·101,26 + G5·101.63 + Р2·56,33 + Р3·75,75 + Р4·104,57+P5·101.63 - Pзр·173,58 = 0;
Звідси
Pзр=3104 Н
Похибка у визначенні зрівноважуючої сили:
Δ= ·100%=3,5% ·100%=3,5%
14
СИНТЕЗ
ЗУБЧАТОГО ЗАЧЕПЛЕННЯ
Розрахунок
розмірів коліс для нерівнозміщеного зачеплення
Досліджуємо
зачеплення коліс 4 і 5 привода. Для розрахунків приймаємо Z4=16, Z5=35 та модуль m=8мм (див. бланк задання).Визначемо
геометричні розміри зубчастих коліс. Визначемо спочатку параметри зачеплення,
які не залежать від зміщення.
Крок зуба по ділильному колу:

Діаметри ділильних кіл:
Діаметри основних кіл:
Визначаємо кут зачеплення:

Визначаємо значення кута з таблиц
нвалют:
Діаметри початкових кіл:
Звідси знаходимо міжосьову відстань:

Коефіціент сприйманого зміщення
міжосьової відстані

Коефіціент вирівнювального зміщення:

Виличина заходу зубців:

Висота зуба:

Діаметри кіл западин:
  
Діаметри кіл головок:

Товщіна зуба по ділильному колу

Якісн
показники зачеплення
Визначення
коефіціента перекриття
Коефіціент
перекриття, по якому можна судити про плавність передачі:

Коефіціент
перекриття показує кількість зубців, що одночасно знаходяться в зачепленні в
часі. Коефіціент 1,157 означає, що 15,7% часу зачеплення здійснюється двома
парами зубців, а 84,3% часу зачеплення – однією парою зубців.
Визначання
коефіціент питомого ковзання
Коефіцієнти
питомого ковзання ν4 і ν5 , по судять про
відносний знос профілів, визначаємо за формулами:
де АВ – довжина
теоретичної лінії зачеплення, мм; Х – поточні значення координати точки зачеплення,
виміряне від початкової точки А колеса 4 теоретичної лінії зачеплення, або,
накше, радіус кривизни евольвенти колеса 4, а АВ-Х – радіус кривизни
евольвенти колеса 5.
Довжина
теоретичної лінії зачеплення:
АВ=аw·sinαw=189,14·sin26,580=84.63мм
Координату Х
приймаємо через кожну 0,1·АВ. Значення коефіціентів питомого ковзання заносимо
в таблицю
| хАВ |
ν4
|
ν5
|
| 0 |
-∞ |
1,000 |
| 0,1 |
-3,500 |
0,778 |
| 0,2 |
-1,000 |
0,500 |
| 0,3 |
-0,167 |
0,143 |
| 0,4 |
0,250 |
-0,333 |
| 0,5 |
0,500 |
-1,000 |
| 0,6 |
0,667 |
-2,000 |
| 0,7 |
0,786 |
-3,667 |
| 0,8 |
0,875 |
-7,000 |
| 0,9 |
0,944 |
-17,000 |
| 1 |
1,000 |
-∞ |
Визначення умови
рівнозношенності.
Якщо точка контакту буде на початку
практичної лінії зачеплення, то

Максимальний коефіціент питомого
ковзання колеса 4 на ніжки зуба буде

Якщо точка контакта буде в кінц
практичної лінії зачеплення, то


Умова рівнозношеності:
Але -1,192 ≠ -1,557, тому
умова рівнозношеності не виконується і колесо 5 буде зношуватись швидше.
15
СИНТЕЗ
ПЛАНЕТАРНОЇ ПЕРЕДАЧІ
Визначення
передаточного відношення планетарної передачі
Привод механізму
парової машини складається з планетарного редуктора і зовнішньої зубчасто
передачі коліс 4 і 5. Число обертів ротора двигуна nдв=1500 об/хв., а число обертів вала
колеса 5, тобто вала кривошипа nкр=400об/хв.
Загальне
пердаточне відношення привода

Передаточне
відношення зубчатої пари коліс 4 і 5:
Передаточне
відношення планетарного редуктора:
За результатами
розрахунку на ЕОМ вибираємо числа зубців коліс редуктора.
Z1=32; Z2=32; Z2’=17; Z3=47; число сателітів К=3.
Перевіримо
отримані параметри за умовами забеспечення складання, співвісності та
сусідства.
Умова
складання
 - умова
виконується - умова
виконується
Умова
свіввісності
Z1+Z2=Z2’+Z3
32+32=17+47
- умова
виконується
Умова
сусідства
(32+32)sin600>2
55.42>2 - умова виконується
Кінематичне
дослідження привода
Графічний метод
дослідження містить в собі побудову картини лінійних швидкостей та діаграм
частот обертання коліс.
Визначемо радіуси
початкових кіл планетарної ступені редуктора:
rw1=m∙Z1=2∙32/2=32мм
rw2=m∙Z2=2∙32/2=32мм
rw2’=m∙Z2’=2∙17/2=17мм
rw3=m∙Z3=2∙47/2=47мм
Креслимо схему
привода у двох проекціях (див. аркуш 3) з масштабним коефіціентом
µl=rw1/O1A=0.032м/16мм=0,002м/мм
Визначемо лінійну
швидкість точки А контакту коліс 1 і 2

З точки А – точки
контакту коліс 1 і 2 відкладаємо відрізок АD=50,26мм, який зображує вектор
лінійної швидкості колеса 1.
Масштабний
коефіціент швидкості
 µV=VA/AD=0,1 мс-1/мм µV=VA/AD=0,1 мс-1/мм
Швидкість центра
колеса 1, точки О1, дорівнює нулю. Закон розподілення швидкостей по
колесу 1 буде прямою лінією, що з’єднує точки О1 і D.
Колеса 2 і 2’ представляють собою єдине тверде
тіло – блок шестерен. Швидкість точки В контакту коліс 2’ і 3 дорівнює нулю.
Закон розподілення швидкостей по блоку коліс 2 і 2’ буде прямою лінією, що
з’єднує точки Д і В плану. Продовжимо цю лінію до пересічення з горизонтальною
лінією, проведеною з точки О2. Відрізок О2Е є швидкістю
центра блока коліс 2 і 2’ і , одночасно, також швидкістю точки О2
водила Н. Закон розподілення швидкостей по водилу Н і колесу 4 є прямою, що
з’єднує точки Е в О1. Цьому законові підкоряється і швидкість точки
С контакту коліс 4 і 5. Проведемо з точки С горизонтальну пряму до пересічення
з лінією О1Е в точці F. Закон розподілення швидкостей по колесу 5 є прямою, що з’єднує точки F і О5.
Будуємо план
частот обертання. Для цього проводимо горизонтальну лінію, на якій позначаємо
точку О. В точці О проводимо перпендикуляр до цієї лінії, на якому відкладаємо
відрізок ОР=h. Нехай h=30мм, тоді масштабний коефіціент
частот:

З креслення
знаходимо частоти обертання коліс редуктора:
n2=-201,04·15.915=-3199.55об/хв
nH=n4=-53.4∙15.915=-849.86
16
СИНТЕЗ
КУЛАЧКОВОГО МЕХАНІЗМУ
Вхідн
дані.
Для
проектування заданий кулачок з плоским штовхачем. Хід штовхача h=30мм.
Кут віддалення φ1=1050 , кут дального стояння φ2=150
, кут наближення φ3= φ1=1050. Закон
руху штовхача заданий у вигляді аналогу прискорення, що описано так: . .
Визначення
закону руху штовхача.
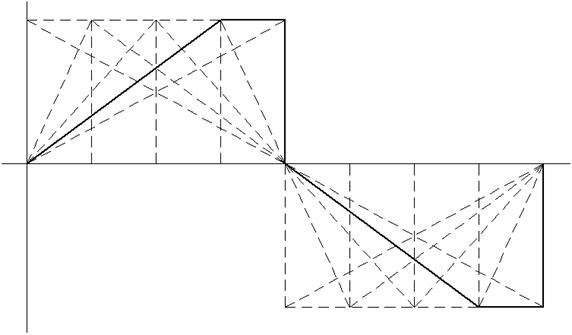
Заданий
закон зміни аналога прискорення (див арк. 4)
Кути
повороту кулачка перенесемо на креслення з масштабним коефіціентом:
Графічно
нтегруючи цю діаграмму аналога прискорення, будуємо спочатку діаграму аналога
швидкості, а потім і діаграму переміщення тарілки штовхача.
Величини
полюсних відстаней при інтегруванні приймемо наступними Н1=45мм, Н2=90мм.
Масштабн
коефіціенти діаграм


Визначення
мінімального радіуса-вектора профілю кулачка.
Для
визначення мінімального радіуса-вектора профілю кулачка будуємо сумарну
діаграму перміщення та аналога прискорення(див. арк. 4). Так як rmin
повинен перевищувати від’ємну сумму переміщення та аналога прискорення, то з
креслення визначаємо найбільшу від’ємну ординату сумарної діаграми
rmin=a·µs+0,01м=38,39·0,00125+0,01=0,058м
Будуємо
профіль кулачка (див. арк. 4). З вільно вибраного центру оюертання кулачка (т.
О1) описуємо коло радіусом rmin.
На вертикальній прямій відкладаємо хід h
та від цієї вертикалі відкладаємо фазові кути φ1,2,3,4. Дуги,
відповідні кутам φ1 та φ3, ділимо на вісім
рівних частин відповідно діленню вісі абцис діаграм руху штовхача. Потім
засікаємо радіуси О11’, O12’,
O13’,
і
т. д. дугами кіл з радіусами О11, О12, О13
т. д. в точках А1, А2, А3 і т. д. Через ц
точки проводимо положення штовхача в оберненому русі. Будуємо криву, яка огиба
усі положення тарілок штовхача в оберненому русі. Ця крива і буде профілєм
кулачка, який відповідає кутам φ1 та φ3.
Для
кутів φ2 та φ4 профіль окреслюється дугами кіл
радіусів rmin
(φ4) та rmin+h(φ2).
ВИСНОВКИ
В результат
виконання курсового проекту зроблені дослідження з структурного, кінематичного,
кінетостатичного та енергетичного аналізу конвеєра, синтез важільного механізму
конвеєра за коефіцієнтом зміни середньої швидкості вихідної ланки, синтез
зубчатого зачеплення і приводу механізму, синтез кулачкового механізму.
Дослідження
проводились аналітичним, графоаналітичним та графічним методами. В розрахунках
аналітичного метода використовувалось ЕОМ і, конкретно, програм: MECH, ZUB, TEST.
Порівняння
здійснювались між результатами розрахунків, отриманими різними методами,
похибка не перевищує 5% по відношенню до аналітичного методу.
Синтез зубчатого
зачеплення проводився за умовами використання нерівно зміщеного зачеплення,
вписування у наперед задану між осьову відстань, забезпечення умови рівно
зношеності коліс зачеплення. Креслення проводилось за однією умовою, але з
аналізом усіх умов.
При синтез
планетарного редуктора числа зубців його коліс підбирались за допомогою ЕОМ та
вручну з використанням умов співвісності, сусідства та складання.
Отриман
результати розрахунків можуть бути використані при подальших розрахунках ланок
на міцність методами деталей машин, опору матеріалів тощо.
|



