Промышленность производство : Дипломная работа: Механизм подъема и его расчет
Дипломная работа: Механизм подъема и его расчет
Ñîäåðæàíèå
Введение
Исходные данные
1. Расчет механизма подъема
1.1 Определение массы подвижных частей механизма подъема
1.2 Расчет и подбор каната
1.3 Расчет канатоведущего шкива
1.4 Расчет натяжения канатов подвески в рабочих и испытательных
режимах
1.5 Выбор электродвигателя
1.6 Расчет редуктора лебедки подъемника
1.7 Расчет тормоза лебедки привода
1.8 Расчетное обоснование геометрических характеристик ручья КВШ
2. Расчет механизма подъема монтажного крана
2.1 Выбор каната
2.2 Определение размеров барабана
2.2.1 Диаметр барабана
2.2.2 Длина барабана
2.2.3 Толщина стенки барабана
Список литературы
Введение
Строительные подъемники — это грузоподъемные машины,
предназначенные для подъема (спуска) груза и людей с помощью грузонесущих
органов (клетей, кабин), перемещающихся по направляющим. Направляющие бывают
вертикальные и наклонные. Подъемники с наклонными направляющими в строительстве
почти не применяются.
По назначению подъемники подразделяются на грузовые и грузопассажирские.
Первые служат только для транспортирования грузов, вторые — грузов и людей.
По способу установки подъемники бывают стационарные и передвижные. Стационарные
не перемещаются относительно здания в процессе работы, передвижные (как
правило, грузовые) — могут перемещаться. Стационарные подъемники, в свою
очередь, бывают приставные, т. е. крепящиеся к зданию при их установке,
и свободно-стоящие, устанавливаемые без этих креплений. Передвижные
подъемники бывают несамоходные и самоходные.
Тип грузонесущего органа подъемника зависит от его назначения:
грузопассажирские подъемники оборудованы кабинами, грузовые — выдвижными,
невыдвижными, поворотными платформами, выдвижными рамами и монорельсами, с
помощью которых груз подают внутрь проема здания и опускают на междуэтажное
перекрытие, а также саморазгружающимися ковшами.
Подъемники выпускаются с канатным и бесканатным механизмами
подъема. Подъемники с канатным механизмом подъема оборудуются барабанными
лебедками или лебедками с канатоведущими шкивами; с бесканатным механизмом
подъема — зубчато-реечным или цевочно-ре-ечным механизмом.
По способу монтажа (степени мобильности) подъемники подразделяются на немобильные,
т. е. разбираемые при демонтаже на секции и перевозимые в таком виде с
объекта на объект, и мобильные, не разбираемые при демонтаже на секции и
перевозимые собранными.
По конструкции направляющих подъемники с вертикальными направляющими
делятся на две группы: с подвесными (гибкими) направляющими и с жесткими
направляющими.
Подъемники с подвесными направляющими экономичны. Однако область
применения их ограничена тем, что консольные рамы можно устанавливать не на
всех зданиях, кроме того, при большой высоте подъемника его грузонесущий орган
раскачивается в поперечном направлении. В этих подъемниках затруднено
применение устройств, обеспечивающих безопасность эксплуатации при обрыве
грузового каната. Применение подъемников ограничено также потому, что при их
работе используется несущая способность зданий, т. е. нагрузки, действующие на
подъемник, передаются на здание, что не всегда допустимо. Подъемники с жесткими
направляющими бывают мачтовые (стоечные) и шахтные.
По сравнению с подъемниками, имеющими подвесные направляющие,
подъемники с жесткими направляющими обладают большими преимуществами. Груз,
поднимаемый подъемником с жесткими направляющими, не раскачивается, что
позволяет увеличить скорость подъема груза и повысить производительность подъемника.
Ходовое устройство грузонесущего органа при перемещении по жестким направляющим
не перекашивается, при этом грузонесущий орган точно останавливается на
заданной высоте и подает груз в намеченное место. На этих подъемниках можно
устанавливать устройства, обеспечивающие безопасность эксплуатации их при
обрыве грузового каната. На подъемниках с жесткими направляющими вертикальные
нагрузки, действующие на подъемник, передаются на его опорную часть, а не на
здание, что имеет большое значение при строительстве зданий повышенной
этажности. Из подъемников с жесткими направляющими шахтные более сложно
монтируются, с их помощью нельзя транспортировать длинномерные грузы. Из всех
рассмотренных типов подъемников мачтовые (стоечные) наиболее распространены.
| Параметр |
Единицы
измерения |
Значение |
| Грузоподъемность |
кН |
10 |
| Высота
подъема |
м |
110 |
| Скорость
подъема |
м/мин |
45 |
|
Размеры
кабины:
А х В х С
|
мм |
1900 х
2000 х 3400 |
Мачтовый грузопассажирский подъемник МГП-1000-110 применяется для
строительства высоких зданий (до 30 этажей). Подъемник состоит из опорной рамы,
на которой монтируется машинное отделение и посадочная площадка, противовеса
мачты и центрально подвешенной кабины. В верхней части мачты располагается
блочная головка и монтажная стрела.
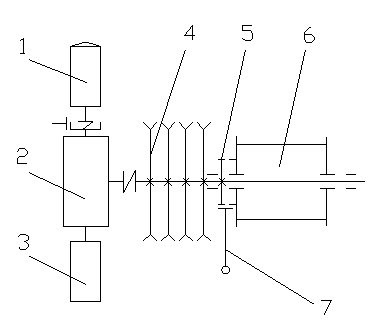
Лебедка этого подъемника (рис.1) состоит из двухскоростного
электродвигателя 1, соединенного с ведущим валом червячного редуктора 2 с
помощью эластичной муфты. На ведомой полумуфте установлен колодочный тормоз. К
ведомому валу редуктора через зубчатую муфту присоединен вал, на котором
свободно посажены монтажный барабан 6 и канатоведущий шкив 4.
Монтажный барабан и канатоведущий шкив включаются с помощи
рукоятки 7 зубчатой муфты 5. Вихревой генератор 3 предназначен для обеспечения
плавного разгона и торможения кабины.
Все детали лебедки смонтированы на общей раме.
рис.1.
Кинематическая схема лебедки
На поверхности канатоведущего шкива 1 (рис.2) есть четыре
клиновидных ручья, в которых располагается четыре грызовых каната, огибающие
шкив. За счет натяжения, создаваемого весом противовеса, канатов, кабины,
канаты прижимаются к поверхностям ручьев. При этом возникает сила трения,
которая предотвращает самопроизвольное проскальзывание канатов относительно
шкива при его вращении и обеспечивает передачу канату тягового усилия,
необходимого для перемещения кабины. Чтобы канат на канатоведущих шкивах не
проскальзывал, масса противовеса должна быть в 1,5 раза больше массы кабины с
полезной нагрузкой
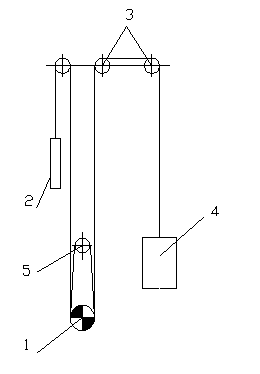
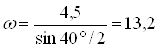
рис.2. схема запасовки грузовых канатов
На подъемнике МГП-1000 четыре грузовые каната, прикрепленные к
кабине 4 через балансирную подвеску, идут вверх, где огибают отводные блоки 3
на головке мачты. Затем канаты опускаются вниз, огибают канатоведущий шкив
лебедки, вновь поднимаются вверх, огибают соответствующие отводные блоки 3 и
опускаются вниз. Здесь их концы закрепляют на каретке противовеса 2. излишки
каната при малой высоте мачты сматывают на четыре резервных барабана 5,
установленных на каретке противовеса. При увеличении высоты мачты грузовые
канаты, запасованные на максимальную высоту подъема кабины, постепенно
сматываются с резервных барабанов.
1.1 Определение массы подвижных частей механизма подъема
Работа механизма подъема подъемника связана с перемещением массы
кабины, противовеса, тяговых канатов и подвесного кабеля.
Работа по преодолению сил тяжести подвижных частей может быть
существенно снижена, если добиться равновесия сил тяжести, действующих на
канатоведущий орган лебедки со стороны кабины и противовеса.
Так как полезный груз в кабине не остается величиной постоянной,
полное уравновешивание кабины с грузом практически исключается. Если силу
тяжести конструкции кабины можно полностью уравновесить с помощью противовеса,
то груз в кабине – только частично.
Влияние неуравновешенности канатов становится весьма ощутимым при
значительной высоте подъема кабины.
Основную роль в системе уравновешивания играет противовес. При
небольшой высоте подъема масса противовеса выбирается из условия
уравновешивания кабины и среднестатистического значения массы полезного груза.
Это обеспечивает существенное снижение окружной нагрузки КВШ и необходимой
мощности привода лебедки.
При высоте подъема кабины более 45 м приходится учитывать влияние
силы тяжести неуравновешенной части тяговых канатов и применять для их
уравновешивания дополнительные гибкие уравновешивающие элементы в виде цепей
или уравновешивающих канатов.
Определение массы противовеса требует предварительного определения
массы кабины по исходным данным или по приближенным соотношениям,
устанавливающим зависимость между площадью пола и массой кабины [10. стр.59].
Масса кабин отечественного производства приближенно определяться
по следующим зависимостям:
пассажирский и грузопассажирский
Qк =(500
550) , кг, (1.1) , кг, (1.1)
где А, В – ширина и глубина кабины, соответственно, м.
Qк =
550х1,9х2= 1900 кг.
Масса противовеса определяется по формуле
Qп = Qк
+ φQ, (1.2)
где φ – коэффициент уравновешивания номинального груза
кабины; Q – масса груза, кг.
Qп = 1900
+0,5х1000 = 2400 кг.
Масса подвесного кабеля
Qпк = qпк
* (H/2 + 5), кг. (1.3)
Выбор типа подвесного кабеля и определение массы 1 метра его длины
производится в зависимости от числа проводящих жил и вида изоляции.
qпк =
0,392 кг/м,
Qпк = 0,392 х (110/2 +5) = 23,5 кг,
Канаты подъёмных механизмов кабин обеспечивают передачу движения
от лебедки к кабине и противовесу с небольшими потерями мощности на
канатоведущем органе и отклоняющих блоках.
Канаты воспринимают растягивающие нагрузки при движении и
неподвижном состоянии кабины, в нормальных эксплуатационных и аварийных
режимах.
От надежности работы системы подвески подвижных частей кабины
зависит жизнь пассажиров. Поэтому к стальным канатам и тяговым цепям
подъемников предъявляются повышенные требования прочности и долговечности. Эти
требования нашли отражения в ПУБЭЛ Госгортехнадзора [1].
Канаты, поступающие на монтаж лифтового оборудования должны иметь
документ (сертификат), характеризующий их качество и оформленный в полном
соответствии с требованиями государственных стандартов. Аналогичные требования
предъявляются к тяговым цепям.
Параллельно работающие канаты подвески кабин (противовесов) должны
иметь одинаковые диаметры, структурные и прочностные характеристики.
Не допускается сращивание тяговых канатов механизмов подъема и
ограничителей скорости.
Номинальный диаметр тяговых канатов подъемников для перевозки людей
должен быть не менее 8 мм, а в ограничителях скорости и подъемниках не
рассчитанных на транспортировку людей, – не менее 6мм.
Число параллельных ветвей канатов подвески кабины (противовеса)
должно быть не менее указанных в таблице 4 ПУБЭЛ [1].
В подъемниках применяются только канаты двойной свивки, которые
свиваются из прядей проволок относительно центрального сердечника, в виде
пенькового каната, пропитанного канатной смазкой.
Обычно стальной канат состоит из 6 прядей и сердечника.
Условия работы канатов в подъемниках с КВШ отличаются наличием
изгибающих, растягивающих, скручивающих и сдвигающих нагрузок, поэтому очень
важно иметь большую поверхность касания проволочек в отдельных слоях. Этому
требованию в наибольшей степени отвечают канаты типа ЛК с линейчатым касанием
между проволоками.
В зависимости от структуры поперечного сечения прядей различают
канаты ЛК-О – при одинаковых диаметрах проволок по слоям навивки, ЛК-Р с
различным диаметром проволок.
Канаты с точечным касанием проволок имеют обозначение ТК.
В обозначении конструкции каната учитывается характер касания
проволок, количество прядей и число проволок в каждой пряди: ЛК-О 6x19 или ТК
6x37.
При использовании канатов важно обеспечить не только достаточную
их прочность, но и надежное соединение с элементами конструкции подъемника.
Стальные канаты должны рассчитываться на статическое разрывное
усилие
Р=> , (1.4) , (1.4)
где Р – разрывное усилие каната, принимаемое по таблицам ГОСТ или
результатам испытания каната на разрыв, кН; К – коэффициент запаса принимаемый
по таблице 6 ПУБЭЛ в зависимости от типа канатоведущего органа, назначения и
скорости кабины [1]; S – расчетное статическое натяжение ветви каната, кН.
Величина расчетного натяжения ветви канатной подвески должна
определяться по следующим зависимостям: для канатов подвески кабины.
 (1.5) (1.5)
для канатов подвески противовеса
  (1.6) (1.6)
где Q – грузоподъемность кабины, кН; QК – масса кабины,
кН; QП – масса противовеса, кН; QТК– масса тяговых
канатов от точки схода с КВШ до подвески, кН; QН – масса натяжного
устройства уравновешивающих канатов, кН; m – число параллельных ветвей канатов;
Uп – кратность полиспаста; где DK = 0,08 м – диаметр
катков; RP = 0,2 коэффициент – сопротивления передвижению от трения
ребер о направляющие; f = 0,02 коэффициент трения качения ходовых колес о
направляющие; μ = 0,01 коэффициент трения в цапфах катка; r = 0,025 радиус
цапф;
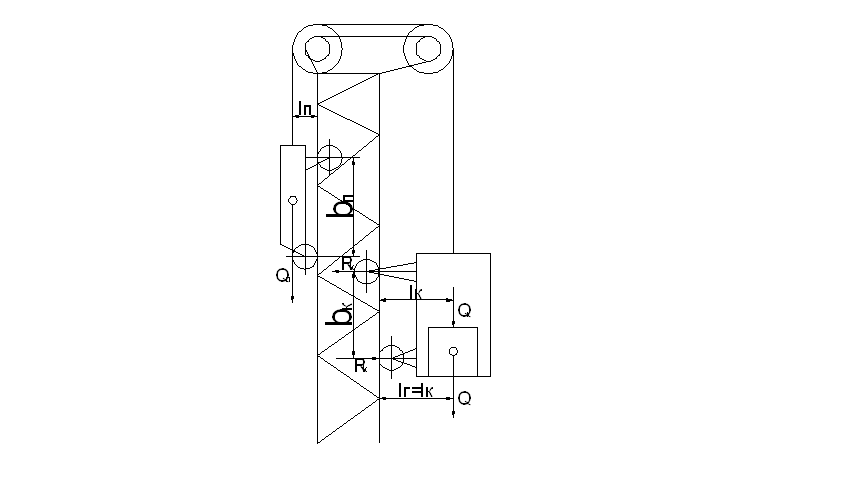
рис.3. Расчетная схема строительного подъемника
Масса тяговых канатов определяется по формуле
 (1.7) (1.7)
где  – приближенное значение массы 1
метра тягового каната, кг/м (принимается 0,4-0,5 кг/м), – приближенное значение массы 1
метра тягового каната, кг/м (принимается 0,4-0,5 кг/м),
 м. м.


Минимальное число канатов регламентируется данными таблицы 5 ПУБЭЛ
в зависимости от типа подъемника и вида канатоведущего органа лебедки [1].
При грузоподъемности 500 – 1000 кг – от 4 до 6 канатов.
Неуравновешенная часть тяговых канатов при скорости кабины не
более 1,4 м/с уравновешивается овальнозвенчатыми цепями, которые не требуют
установки натяжного устройства. В этом случае, в формуле (1.6) принимается
значение Qн=0.
Р = 8,88 х 12 = 106,6 кН.
По полученному
статическому разрывному усилию выбираем типоразмер каната. ЛК-Р 1764 ГОСТ
2688-80:
Sраз =
108кН; dК = 14мм; qТК = 0,728кг/м.
В пассажирских подъемниках применяется прямая подвеска.
По расчетному значению разрывной нагрузки Р и таблицам ГОСТ
определяется необходимый диаметр каната, так, чтобы табличное значение
разрывной нагрузки было равно или больше расчетной величины.
После выбора типа и определения диаметра каната производится
проверка фактической величины коэффициента запаса прочности каната подвески
кабины или противовеса.
 ,(1.8) ,(1.8)
где РТ – табличное значение разрывной нагрузки
выбранного каната, кН, Qтк = m * qткф
* (3-4м) – фактическое значение массы каната от точки схода с КВШ до
подвески кабины (противовеса).кг;  – фактическое значение
массы 1 метра тягового каната выбранного каната, кг/м. – фактическое значение
массы 1 метра тягового каната выбранного каната, кг/м.
Правильному выбору каната должно соответствовать условие
 (1.9) (1.9)
12,15 ≥ 12.
Если условие прочности (1.9) не выполняется, следует выбрать канат
с большим значением удельной прочности или увеличить число параллельных ветвей.
Надежность и долговечность канатов подъемника определяются не
только его прочностными характеристиками.
Для обеспечения долговечности каната важно обеспечить минимальное
число их перегибов на отклоняющих блоках и допустимое по ПУБЭЛ соотношение
между диаметром каната и огибаемого канатом цилиндрического тела (КВШ,
отклоняющий блок). В связи с этим, диаметр КВШ и отклоняющих блоков следует
определять с учетом условия долговечности
 , (1.10) , (1.10)
где D, d – диаметр огибаемого цилиндрического тела и
каната, соответственно, м.; Е – коэффициент допустимого соотношения диаметров
регламентируемый данными таблицы 3 и 4 ПУБЭЛ в пределах от 30 до 45 для тяговых
канатов и от 18 до 35 для канатов вспомогательных устройств [1].
D = 14 х
40 = 560 мм.
В конструкции механизмов подъема подъемников с канатной подвеской
кабины (противовеса) канатоведущие шкивы используются для преобразования
вращательного движения выходного вала механизма привода в поступательное
перемещение кабины (противовеса).
В зависимости от кинематической схемы подъемника применяются также
отклоняющие блоки.
Применение КВШ в подъемниковых лебедках позволяет существенно
повысить безопасность пассажиров, практически исключая опасность обрыва
канатов, так как кабина может быть подвешена на нескольких параллельных ветвях
канатов, а высота переподъема ограничивается проскальзыванием канатов из-за
посадки противовеса на буфер.
Независимость параметров лебедки с КВШ от высоты подъема открывает
широкие возможности унификации лебедок с соответствующими
технико-экономическими преимуществами.
Внешняя нагрузка КВШ, определяемая разностью натяжения канатов
подвески кабины и противовеса, уравновешивается действием сил сцепления канатов
с ободом. Эти силы зависят от угла обхвата шкива канатами и формы профиля
поперечного сечения канавок [10. стр.36].
Для обеспечения работы КВШ без проскальзывания канатов применяются
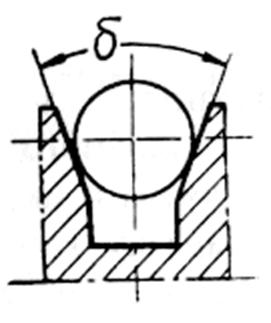
канавки специального профиля (рис. 4).
Канатоведущие шкивы и отклоняющие блоки изготавливаются из
чугунного или стального литья. Отливка в зоне обода должна иметь достаточно
высокую твердость и однородную структуру.
Расстояние между канавками обода КВШ зависит от диаметра каната
 , (1.11) , (1.11)
Ширина обода КВШ определяется числом параллельных ветвей канатов
 , (1.12) , (1.12)
где t, d – шаг канавок и диаметр каната, мм; m - число
параллельных ветвей канатов; z – число обхватов канатами КВШ.
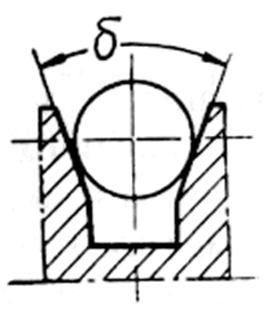
Рис.4. Профиль поперечного сечения канавки обода КВШ клиновая с
подрезом, δ – угол подреза (угол клина)
 мм мм
 мм мм
Диаметр КВШ определяется в зависимости от кинематической схемы
подъемника и условия долговечности.
После выбора редуктора лебедки производится уточнение диаметра
барабана (КВШ) по кинематическому условию, гарантирующему обеспечение
номинальной скорости движения кабины с погрешностью не превышающей 15%.
 , м, (1.13) , м, (1.13)
где Vр – рабочая скорость кабины, равная номинальной
или отличающейся на 15 %, м/с; Uр – табличное значение передаточного
числа редуктора лебедки;  – номинальное значение частоты
вращения вала двигателя, об/мин. – номинальное значение частоты
вращения вала двигателя, об/мин.
В конструкции отклоняющих блоков, не предназначенных для передачи
тягового усилия канатам, применяется полукруглая канавка, обеспечивающая
минимальную величину контактных давлений, что способствует увеличению
долговечности канатов.
В КВШ используется канавка клиновые с подрезом.
Наибольшую силу сцепления обеспечивают канавки клинового профиля,
однако, их существенным недостатком является зависимость силы сцепления от
степени износа опорной поверхности.
В результате износа клиновая канавка преобразуется в полукруглую с
подрезом с заметно меньшей силой сцепления.
Расчетное обоснование характеристик профиля поперечного сечения
канавок КВШ производится по аналитическим зависимостям, полученным на основе
рассмотрения особенности взаимодействия растяжимых канатов с ободом шкива.
Приведенное значение коэффициента трения между тяговым
канатом и поверхностью ручья КВШ определяется свойством контактирующих
материалов и геометрическими характеристиками профиля ручья. От величины этого
коэффициента в определяющей степени зависит тяговая способность канатоведущего
шкива.
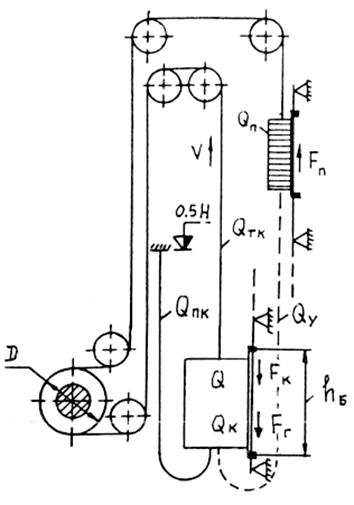
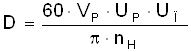
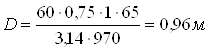
Рис. 5. Расчетная схема подъемника с нижним машинным
помещением
а) б)
Рис. 6. Схемы к расчету опорных реакций башмаков кабины:
а) схема горизонтальной проекции кабины;
б) схема вертикальной проекции кабины.
Рассмотрим расчет сопротивлений более подробно с учетом расчетных
схем, приведенных на рис. 6. Приняты следующие обозначения:; А, В - ширина и
глубина кабины, м; h - расстояние между башмаками по вертикали, м; П -
обозначение точка подвески кабины; Хп, Yп - продольное и
поперечное смещение точки подвески кабины относительно центра пола, м; S -
натяжение тяговых канатов, кН; К - положение центра масс кабины; Г - положение
центра масс расчетного груза; Хв, Yв - продольное и
поперечное смещение центра масс кабины относительно центра пола, м; Хг,
Yг - продольное и поперечное смещение центра масс расчетного груза,
м; Nп, Nн - нормальные реакции в зоне контакта башмаков с
направляющими, которые действуют перпендикулярно и параллельно плоскости
направляющих; Рк, Рг - сила тяжести кабины и груза,
соответственно, кН.
Силы нормального давления, действующие на башмаки в плоскости
направляющих и в перпендикулярном к ним направлении, определим из уравнений
равновесия кабины:
∑Мх
= 0, ∑Мy = 0, (1.14)
Из уравнений равновесия определим соответствующие нормальные
реакции
 , (1.15) , (1.15)
 , (1.16) , (1.16)
где Рг = Qр*10-2
величина силы тяжести массы расчетного груза, кН (для пассажирского подъемника
Qр=0.5*Qс, где Qс
грузоподъемность из условия свободного заполнения кабины; Рк - сила
тяжести массы кабины, кН; Хп, Yп - координаты
смещения точки подвески кабины принимаются по конструктивным соображениям от 0,03
до 0,1 м; Хв, Yв - величина продольного и
поперечного смещения центра масс кабины, зависящая от конструкции дверей кабины
и может приниматься в пределах от 0,02 до 0,1 м; Хг,=В/6, Yг=А/6
- определяются в предположении, что расчетный груз равномерно распределен
по треугольной площадке, составляющей 50 % площади пола кабины, отделенной
диагональю прямоугольного контура [10. стр.64].


Нормальные давления для кабины без груза
 (1.17) (1.17)
 (1.18) (1.18)


Нормальные давления для расчетного груза без учета массы кабины
 (1.19) (1.19)
 (1.20) (1.20)
Сопротивление движению кабины без груза: при башмаках скольжения
 (1.21) (1.21)
где ωр=0,04-0,06 - коэффициент сопротивления
движению роликовых башмаков; РР ≤0,01, кН – сила
предварительного прижатия ролика к направляющей.

Сила сопротивления движению расчетного груза
- при роликовых башмаках
 (1.22) (1.22)

Сила сопротивления движению противовеса
- при роликовых башмаках
 (1.23) (1.23)

1.4.1 Расчет натяжения канатов подвески кабины Sк и
противовеса Sп в рабочих и испытательных режимах
Рассмотрим подъемник с нижним машинным помещением(рис. 6).
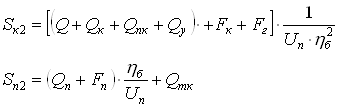
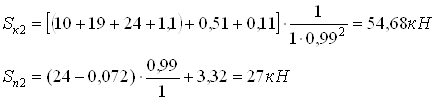
Режим подъема неуравновешенного груза.
Груженая кабина внизу, подъем
 (1.24, 1.25) (1.24, 1.25)
где Qу
масса уравновешивающих цепей; ηб – кпд блока канатной системы.

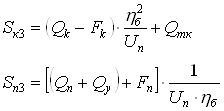
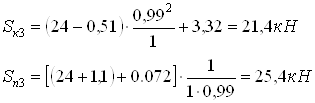
Груженая кабина вверху, подъем
 (1.26, 1.27) (1.26, 1.27)
Порожняя кабина внизу, спуск
 (1.28, 1.29) (1.28, 1.29)
Порожняя кабина вверху, спуск
 (1.30,
1.31) (1.30,
1.31)
Перегруженная на 10% кабина внизу, подъем; динамические
испытания
 (1.32) (1.32)
Перегруженная на 10% кабина вверху, подъем; динамические испытания
 (1.33) (1.33)
Режим опускания неуравновешенного груза Груженая кабина внизу,
спуск
 (1.34) (1.34)

Гружёная кабина вверху, спуск
 (1.35) (1.35)

Порожняя кабина внизу, подъем
 (1.36) (1.36)
Порожняя кабина вверху, подъем
 (1.37) (1.37)
Статические испытания подъемника, перегруженная на 100% кабина
внизу
 (1.38) (1.38)

1.4.2 Расчет соотношения натяжения канатов, консольной и окружной
нагрузки канатоведущего шкива (КВШ).
Соотношение натяжения канатов подвески кабины и противовеса
определяется для 11 рабочих и испытательных режимов по формуле [10]
 (1.39) (1.39)
где Simax, Simin - наибольшее и
наименьшее значение величины натяжения канатов подвески кабины и противовеса в
i-ом режиме.
Ψ1 =
33,5/24,7 = 1,36
Ψ2 =
54,68/24,7 = 2,03
Ψ3 =
25,4/21,4 = 1,19
Ψ4 =
27,6/10,6 = 2,6
Ψ5 =
34,5/24,7 = 1,4
Ψ6 =
55,7/27 = 2,06
Ψ7 = 27,8/25,4
= 1,09
Ψ8 =
29,7/27,6 = 1,08
Ψ9 =
24,7/23,2 = 1,06
Ψ10 =
27/20,8 = 1,3
Ψ11 =
42,3/24 = 1,76
Консольная нагрузка КВШ определяется для каждого из 11 режимов
Pki = Ski
+Sпi (1.40)
где i = 1-11 - порядковый номер режима.
Рк1 = 33,5
+ 24,7 = 58,2 кН
Рк2 = 54,7
+ 27 = 81,7 кН
Рк3 = 21,4
+ 25,4 = 46,8 кН
Рк4 = 10,6
+ 27,6 = 38,2 кН
Рк5 = 34,
+ 24,7 = 59,2 кН
Рк6 = 55,7
+ 27 = 82,7 кН
Рк7 = 27,8
+ 25,4 = 53,2 кН
Рк8 = 29,7
+ 27,6 = 57,3 кН
Рк9 = 23,2
+ 24,7 = 47,9 кН
Рк10 =
20,8 + 27 = 47,8 кН
Рк11 =
42,3 + 24 = 66,3 кН
Окружная нагрузка КВШ определяется для 11 режимов:
в режиме подъема неуравновешенного груза
Pi = Smax
Smin + 0.02*Smax (1.40)
Р1 = 33,5
24,7 +0,02*33,5 = 9,5 кН
Р2 = 54,7
27 +0,02*54,7 = 28,8 кН
Р3 = 25,4
21,4 +0,02* 25,4 = 4,5 кН
Р4 = 27,6
10,6 +0,02*27,6 = 17,6 кН
Р5 = 34,5
24,7 +0,02*34,5 = 10,5 кН
Р6 = 55,7
27 +0,02*55,7 = 29,8 кН
в режиме опускания неуравновешенного груза
Pi = Smax
Smin - 0.02*Smax (1.41)
Р7 = 27,8
25,4 - 0,02*27,8 = 1,8 кН
Р8 = 29,7
27,6 - 0,02*29,7 = 1,5 кН
Р9 = 24,7
23,2 - 0,02*24,7 = 1 кН
Р10 = 27
20,8 - 0,02*27 = 5,57 кН
Р11 = 42,3
24 - 0,02*42,3 = 17,5 кН
Расчет необходимой мощности привода лебедки
 (1.42) (1.42)
где Pмакс~ максимальное значение величины
окружной нагрузки КВШ в режиме подъема неуравновешенного груза (режимы с 1 по
4); ηм=0,7ч-0,75 - КПД механизма лебедки.
По каталогу выбираем электродвигатель МТВ 412-6, со следующими
параметрами [5.стр.47]:
N = 30кВт; n = 970 об/мин; Мmax = 850 Нм; J = 0,7 Нм2;
ПВ 25%.
В лебедках подъемников преимущественное распространение получили
червячные передачи (рис. 3.3) в силу ряда очевидных преимуществ: возможность
получения больших передаточных чисел в одной паре, плавность и бесшумность
работы [10.стр.48].
Недостатком червячной передачи является сравнительно низкий КПД,
повышенный износ в связи с большими скоростями скольжения в зацеплении, склонность
к задирам и заеданию
контактирующих поверхностей.
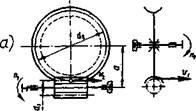 
Рис. 7. Схема червячной передачи редуктора
а) червячная передача; б) червяк цилиндрический; в) червяк
глобоидный
В нашей стране до недавнего времени отдавалось предпочтение
глобоидным передачам.
Глобоидные червячные передачи обладают повышенной нагрузочной
способностью, так как в зацеплении с зубом червяка одновременно находится
несколько зубьев, и линии контакта зубьев с червяком располагаются практически
перпендикулярно вектору скорости скольжения, что способствует образованию
непрерывной масляной пленки на трущихся поверхностях.
Благоприятные условия смазки способствуют устранению заедания в
червячном зацеплении.
Увеличение площади контактной поверхности позволяет использовать
более дешевые сорта бронзы и дает некоторую экономию цветных металлов. Именно
это обстоятельство предопределило предпочтительное применение глобоидных
передач в лебедках подъемников отечественного производства в послевоенный
период. Наряду с очевидными достоинствами, глобоидные передачи имеют весьма
существенные недостатки.
Значительно сложнее технология изготовления глобоидных передач.
Практическое отсутствие оборудования для шлифовки глобоидного червяка исключило
возможность его термической обработки, что в свою очередь, привело к снижению
усталостной прочности, уменьшению КПД и повышенному износу зубьев колеса в
связи с наличием существенных микронеровностей на поверхности червяка.
Отсутствие аналитической теории и использование экспериментальных зависимостей
существенно усложняет процесс проектирования.
Глобоидные передачи весьма критичны к точности сборки и
регулировке осевого положения червяка и колеса.
Снижение точности сборки и регулировки глобоидной передачи влечет
за собой резкое снижение КПД и может вызвать заклинивание червячного зацепления.
В связи с этим, исключалась возможность применения пролетной схемы установки
КВШ с выносной опорой. Доминирующим решением стала консольная установка КВШ и,
связанное с этим, увеличение габаритов подшипников выходного вала редуктора.
К недостатку глобоидной передачи следует отнести и наличие
небольших кинематических колебаний окружной скорости червячного колеса, которые
могут служить одной из причин вибрации кабины.
В лебедках подъемников применяют три способа расположения
червяка редуктора: нижнее горизонтальное, верхнее горизонтальное и
вертикальное.
Утечка масла полностью устраняется в лебедках с верхним и
вертикальным расположением червяка.
Лебедки с верхним расположением цилиндрического червяка успешно
применяются в подъемниках зарубежного и отечественного производства. На рис.7
представлен фрагмент конструкции редуктора отечественного производства с
верхним расположением червячного вала, который одновременно является валом
ротора двигателя.
Применение системы мотор - червяк позволяет отказаться от использования
соединительной муфты. При этом, снижается виброактивность редуктора, масса и
габариты лебедки. Уменьшается трудоемкость ремонтных работ и технического
обслуживания.
Недостатком редуктора с верхним расположением червяка является
ухудшение условий смазки зацепления после длительного простоя подъемника.
Остаточная масляная пленка не гарантирует жидкостное трение в
момент пуска двигателя.
Для компенсации этого недостатка и повышения несущей способности
масляной пленки целесообразно увеличивать скорость скольжения контактирующих
поверхностей червячного зацепления за счет применения двигателя с повышенной
частотой вращения ротора.
Расчет червячных редукторов лебедок подъемников не имеет особой
специфики за исключением необходимости учета значительной консольной нагрузки
на выходной вал при консольной установке КВШ. Специфичен и характер нагрузок,
определяемый назначением и режимом работы подъемника.
Выбор редуктора с глобоидным при консольной установке КВШ может
производиться аналогичным образом и должен обеспечивать выполнение следующих
необходимых условий:
Uр ≥
Uо; [М] ≥ Мэ; [р] ≥ рк; ПВр
≥ ПВл; Nр ≥ Nд, (1.43)
где Uр,Uо – табличное и
расчетное значение передаточного числа редуктора; [М] Мэ –
табличное значение допускаемого момента на тихоходном валу и величина
расчетного эквивалентного момента, Нм; [р], рк - табличное
значение допускаемой консольной нагрузки на тихоходном валу и расчетная
консольная нагрузка, кН; ПВр, ПВл – табличное
значение продолжительности включения редуктора и проектируемого подъемника; Nр,
Nд, – расчетное значение мощности редуктора и двигателя
лебедки, кВт.
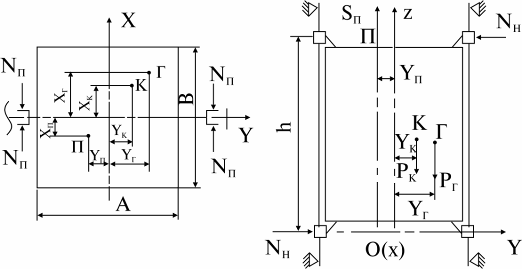
Передаточное число редуктора определяется с учетом кинематической
схемы подъемника по следующей формуле
 (1.44) (1.44)
где D – расчетная величина диаметра КВШ, м; nн
номинальное значение частоты вращения вала двигателя, об/мин; V – расчетное
значение величины скорости кабины, м/с.
Расчет величины эквивалентного крутящего момента вала КВШ
производится с учетом вероятностного характера изменения нагрузки
Мэ = Рmax
* D/2 * Кэ * 10-3, Нм (1.45)
где Рmax – максимальная окружная нагрузка КВШ в
режиме подъема неуравновешенного груза, кН; Кэ – коэффициент
эквивалентности реальной диаграмме нагрузки.
Мэ =
28,8х0,56/2х0,8х10-3 = 0,006 Нм.
Для подъемников с противовесом Кэ принимается в
диапазоне от 0,7 до 0,9 [10. стр.52].
Выбираем типоразмер редуктора:
Uр Uо; 65 ≥
37,9;
[р] ≥ рк; 94 ≥ 82,7
кН;
ПВр ≥ ПВл; 25 ≥
25 %;
Nр ≥ Nд, 33,5 ≥
30 кВт.
Величина расчетной консольной нагрузки Рк определяется
для режима, в котором окружная нагрузка КВШ принимает наибольшее значение Рmax.
Поверочный расчет редуктора, в случае необходимости, может
производиться традиционными методами.
После выбора редуктора лебедки производится уточнение диаметра
барабана (КВШ) по кинематическому условию, гарантирующему обеспечение
номинальной скорости движения кабины с погрешностью не превышающей 15%.
 , м, (1.46) , м, (1.46)
где Vр – рабочая скорость кабины, равная номинальной
или отличающейся на 15 %, м/с; Uр – табличное значение передаточного
числа редуктора лебедки;  – номинальное значение частоты
вращения вала двигателя, об/мин. – номинальное значение частоты
вращения вала двигателя, об/мин.
 . .
Тормоз предназначен для замедления движения машины или механизма,
полной остановки и надежной фиксации неподвижного состояния.
Тормоза лебедок подъемников должны удовлетворять следующим
требованиям: высокая надежность и безопасность работы; наличие механизма
ручного выключения тормоза с самовозвратом в исходное состояние; высокое
быстродействие; низкая виброактивность и уровень шума; технологичность
изготовления и малая трудоемкость технического обслуживания; обеспечение
необходимой точности остановки кабины в подъемниках с нерегулируемым приводом.
В лебедках подъемников используются колодочные тормоза
нормально-замкнутого типа с электромагнитной растормаживающей системой.
Правила ПУБЭЛ исключают возможность применения ленточных тормозов
в связи с их недостаточной надежностью.
Роль тормоза лебедки подъемников зависит от типа привода.
В лебедках с нерегулируемым приводом тормоз используется для
обеспечения необходимой точности остановки и надежного удержания кабины на
уровне этажной площадки, тогда как в лебедках с регулируемым приводом - только
для фиксации неподвижного состояния кабины.
Для наиболее распространенных конструкций колодочных тормозов
лебедок подъемников характерно наличие независимых тормозных пружин каждой
колодки, а в некоторых случаях, и независимых растормаживающих электромагнитов.
Тормозные накладки закрепляются на колодках посредством винтов,
заклепок или приклеиванием термостойким клеем и обеспечивают угол обхвата шкива
от 70° до 90°.
Материал накладок должен обеспечивать высокое и стабильное
значение коэффициента трения в широком диапазоне температур, хорошую
теплопроводность для исключения местного перегрева поверхности трения и
высокую износостойкость.
Кинематические схемы колодочных тормозов весьма разнообразны (рис.
8). Они отличаются способом создания тормозного усилия и особенностями
конструкции механизма растормаживания.
Лебедки с верхним горизонтальным расположением червяка оборудуются
колодочными тормозами, изготовленными по схеме рис. 8.
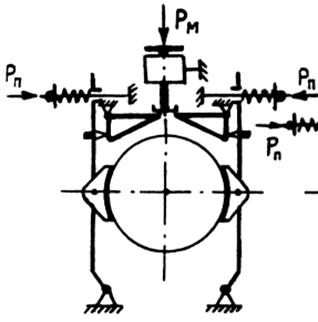
Рис. 8. Схема колодочного тормоза подъемниковой лебедки с
короткоходовым электромагнитом
Тормозное усилие в этих тормозах создается цилиндрическими
пружинами, тогда как выключение тормоза осуществляется электромагнитами
постоянного или переменного тока, получающими электропитание в момент включения
двигателя лебедки.
Тормозные электромагниты различаются величиной хода подвижного
сердечника (якоря) и подразделяются на короткоходовые и длинноходовые.
В конструкциях колодочных тормозов зарубежного и отечественного
производства чаще применяются короткоходовые электромагниты постоянного тока,
так как они меньше шумят и имеют лучшие тяговые характеристики (рис. 9.).
Недостатком электромагнитов постоянного тока является их
электромагнитная инерция, связанная с большой индуктивностью катушки. Поэтому
возникает возможность запуска двигателя под тормозом.
Для исключения такой возможности необходимо форсировать нарастание
тока в катушке магнита в момент включения или обеспечить опережающее включение
питания магнита.
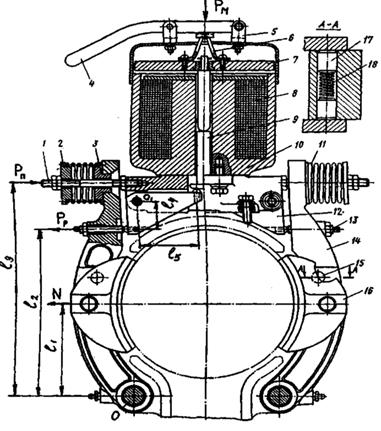
Рис. 9. Тормоз с вертикальным расположением электромагнита постоянного
тока
1 – шпилька; 2 – фасонная шайба; 3 – втулка опорная; 4 – рычаг; 5
вилка; 6 – подставка; 7 – якорь; 8 – катушка магнита;
9 – шток; 10 – корпус магнита; 11 – пружина; 12 – двуплечий рычаг;
13 – винт регулировочный; 14 – рычаг; 15 – фиксатор колодки; 16 – колодка
Регулировка тормозного момента производится посредством ключа 5
путем вращения шпильки 6 и гаек 8, 9.
Ручное выключение тормоза производится не показанном на схеме
рычагом.
Расчетная величина тормозного момента определяется на основании
рассмотрения двух режимов работы лебедки: наиболее тяжелый эксплуатационный
режим с максимальной окружной нагрузкой КВШ и режим статических испытаний.
Тормозной момент в расчетном эксплуатационном режиме
 (1.47) (1.47)
Тормозной момент в режиме статических испытаний
 , (1.48) , (1.48)
где Рмах – максимальное значение величины окружного
усилия КВШ в наиболее тяжелом эксплуатационном режиме, включая режим
динамических испытаний, кН; Рис – окружное усилие КВШ в
режиме статических испытаний, кН; ŋп, ŋо – прямой
КПД при номинальных оборотах двигателя и обратный КПД при200 об/мин; D – расчетное
значение величины диаметра КВШ, м; Uр – передаточное число
редуктора; Ктэ, Ктис – коэффициент запаса тормозного
момента для эксплуатационного режима и режима статических испытаний,
соответственно (для пассажирского подъемника: Ктэ = 2, Ктис
= 1,4 [10. стр.58]).
По наибольшей величине тормозного момента Мт и
соответствующему каталогу выбирается тип колодочного тормоза:
ТКТ-300/200
Мт =
240Нм, ПВ = 25%, Dш = 300мм, δш = 0,5.
Этот расчет выполняется на завершающем этапе тягового расчета
подъемника при следующих исходных данных: форма профиля ручья КВШ и,
соответствующее ей, рекомендуемое значение коэффициента запаса тяговой
способности; d,D – расчетное значение диаметра каната и КВШ, м; S
максимальное значение величины натяжения ветви каната, кН; [p] – допускаемое
значение величины контактного давления, МПа. Порядок расчетного обоснования
геометрических характеристик ручья КВШ.
Обод шкива проверяется на допускаемое напряжение смятия в зоне
контакта с рабочей поверхностью ручья по формуле
 (1.49) (1.49)
где d,D – расчетное
значение диаметра каната и КВШ, м; S – максимальное значение величины натяжения
ветви каната, кН; [p] – допускаемое значение величины контактного
давления, Мпа; m – число канатов.
Для клинового ручья
коэффициент давления может быть определен по формуле:
 (1.50) (1.50)
Угол δ
принимается из диапазона 35 - 40°[11. стр.77].

Для чугунного шкива допустимое напряжение смятия может быть
определено по графику на рис. 3.14 (10. стр. 43).
7 ≤ 8,5 МПа.
В процессе эксплуатации канавки шкивов подвергаются усиленному
износу. Для восстановления нормальной формы ручья производят периодическую
проточку шкивов. Для удобства ремонта и замены обод шкива может быть съемным.
2.1 Выбор каната
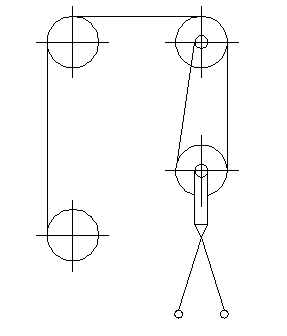
рис.10. схема запасовки монтажного каната
Îïðåäåëèì
ìàêñèìàëüíîå
ñòàòè÷åñêîå
óñèëèå
êàíàòà  . Âåñ
íîìèíàëüíîãî
ãðóçà è
êðþêîâîé
ïîäâåñêè: . Âåñ
íîìèíàëüíîãî
ãðóçà è
êðþêîâîé
ïîäâåñêè:
 Í Í êÍ. (2.1) êÍ. (2.1)
Ìàêñèìàëüíîå
ñòàòè÷åñêîå
óñèëèå â êàíàòå:
 , (2.2) , (2.2)
ãäå  êîëè÷åñòâî
âåòâåé
êàíàòà
íàáåãàþùèõ íà
áàðàáàí,
êîëè÷åñòâî
âåòâåé
êàíàòà
íàáåãàþùèõ íà
áàðàáàí,  ; ;
 êðàòíîñòü
ïîëèñïàñòà,
êðàòíîñòü
ïîëèñïàñòà,  ; ;
 – ê.ï.ä.
âñåõ
íàïðàâëÿþùèõ
áëîêîâ: – ê.ï.ä.
âñåõ
íàïðàâëÿþùèõ
áëîêîâ:
 , ,
ãäå  – ê.ï.ä.
îäíîãî
íàïðàâëÿþùåãî
áëîêà, – ê.ï.ä.
îäíîãî
íàïðàâëÿþùåãî
áëîêà,  ; ;
 êîëè÷åñòâî
íàïðàâëÿþùèõ
áëîêîâ;
êîëè÷åñòâî
íàïðàâëÿþùèõ
áëîêîâ;

 – ê.ï.ä.
ïîëèñïàñòà, – ê.ï.ä.
ïîëèñïàñòà,  ; ;
 êÍ. êÍ.
Âûáîð
òèïîðàçìåðà
êàíàòà
Ïî
óñëîâèþ
îáëàñòè
ïðèìåíåíèÿ
âûáèðàåì íàèáîëåå
ïðåäïî÷òèòåëüíûé
òèïîðàçìåð
êàíàòà ËÊ-ÐÎ ( (1+7+7/7+14)+1î.ñ.,
ÃÎÑÒ 7668-80) [12, ò.2, ñ.243,
òàá. V.2.2.] (1+7+7/7+14)+1î.ñ.,
ÃÎÑÒ 7668-80) [12, ò.2, ñ.243,
òàá. V.2.2.]
Îïðåäåëèì
ðàçðûâíîå
óñèëèå
âûáèðàåìîãî
êàíàòà:
 , (2.3) , (2.3)
ãäå  êîýôôèöèåíò
çàïàñà,
îïðåäåëÿåìûé
ïî ãðóïïå
ðåæèìà
ðàáîòû
ìåõàíèçìà
3Ì [12, ò.2, ñ.250, òàá.V.2.4.];
êîýôôèöèåíò
çàïàñà,
îïðåäåëÿåìûé
ïî ãðóïïå
ðåæèìà
ðàáîòû
ìåõàíèçìà
3Ì [12, ò.2, ñ.250, òàá.V.2.4.];
 êÍ. êÍ.
Ïî
ðàçðûâíîìó
óñèëèþ
âûáèðàåì
íàèáîëåå ïîäõîäÿùèé
òèïîðàçìåð
êàíàòà
9,7-Ã-Â-Î-Í-1764, ÃÎÑÒ
7668-80) [12, ò.2, ñ.246, òàá.V.2.3],
èìåþùèé
ïàðàìàòðû:
 êÍ, êÍ,
 ìì, ìì,
 êã
(ìàññà
îäíîãî
ïîãîííîãî
ìåòðà
êàíàòà); êã
(ìàññà
îäíîãî
ïîãîííîãî
ìåòðà
êàíàòà);
íàçíà÷åíèå
êàíàòà
ãðóçîâîå;
ìàðêà
ïðîâîëîêè
âûñøàÿ;
ñî÷åòàíèå
íàïðàâëåíèé
ñâèâêè
îäíîñòîðîííåå;
ñïîñîá
ñâèâêè
íåðàñêðó÷èâàþùèéñÿ;
ìàðêèðîâî÷íàÿ
ãðóïïà – 1764.
Âûïîëíèì
ïðîâåðêó
êàíàòà íà
ïðîãèá â
êðþêîâîé
ïîäâåñêå:
 , (2.4) , (2.4)
ãäå å
êîýôôèöèåíò,
çàâèñÿùèé
îò òèïà
ìàøèíû è
ðåæèìà
ðàáîòû. Äëÿ
ñòðåëîâîãî
êðàíà è ðåæèìà
3Ì å=16 [12, ò.2, ñ.250,
òàá.V.2.4.];
 ìì, ìì,
Ïðè
óñòàíîâêå
áàðàáàíà íà
ðîëèêîâûõ
ïîäøèïíèêàõ
 [12,
ò.2, ñ.237, òàá.V.1.69]. [12,
ò.2, ñ.237, òàá.V.1.69].
2.2.1 Диаметр барабана
Ïðèìåì
äèàìåòð
áàðàáàíà èç
íîðìàëüíîãî ðÿäà
 ìì. ìì.
2.2.2 Длина барабана
Íàéäåì
äëèíó
áàðàáàíà
äëÿ
îäèíàðíîãî
ïîëèñïàñòà:
 , (2.5) , (2.5)
ãäå  êàíàòîåìêîñòü
áàðàáàíà, ì;
êàíàòîåìêîñòü
áàðàáàíà, ì;
dÊ –.äèàìåòð
êàíàòà, ìì;
Dá
äèàìåòð
áàðàáàíà,
ìì;
m – ÷èñëî
ñëîåâ
íàâèâêè.
Îïðåäåëèì
êàíàòîåìêîñòü
áàðàáàíà
èñõîäÿ èç
êîíñòðóêöèè
ïîäúåìíèêà:
 ì ì
òîãäà,
 ìì ìì
Òîëùèíó
ñòåíêè
áàðàáàíà
îïðåäåëèì ïî
ôîðìóëå:
 , (2.6) , (2.6)
ãäå S
ìàêñèìàëüíîå
íàòÿæåíèå
êàíàòà,  êÍ; êÍ;
Ê1
êîýôôèöèåíò,
ó÷èòûâàþùèé
÷èñëî ñëîåâ
íàâèâêè (ïðè m =
3 Ê1 =1,8);
Ê2
êîýôôèöèåíò,
ó÷èòûâàþùèé
îñëàáëåíèå
íàòÿæåíèÿ
ðàíåå
óëîæåííûõ
âèòêîâ
âñëåäñòâèå
ñæàòèÿ
áàðàáàíà
ïðè
íàâèâàíèè
ïîñëåäóþùèõ
âèòêîâ (äëÿ
÷óãóííîãî
áàðàáàíà Ê2 =
0,8);
 äîïóñòèìîå
íàïðÿæåíèå
(ïðèíèìàåòñÿ
ñ êîýôôèöèåíòîì
çàïàñà
ðàâíûì 5
îòíîñèòåëüíî
ïðåäåëà
òåêó÷åñòè);
äîïóñòèìîå
íàïðÿæåíèå
(ïðèíèìàåòñÿ
ñ êîýôôèöèåíòîì
çàïàñà
ðàâíûì 5
îòíîñèòåëüíî
ïðåäåëà
òåêó÷åñòè);
Òàê êàê
ìåõàíèçì
ðàáîòàåò â
ëåãêîì ðåæèìå
ïðèìåì
ìàòåðèàë
èçãîòîâëåíèÿ
áàðàáàíà
÷óãóí Ñ× 15-32.
Òîãäà  , ãäå
ïðè , ãäå
ïðè  , ò. å. , ò. å.  ÌÏà. ÌÏà.
Òîëùèíà
ñòåíêè
áàðàáàíà:
 ì = 16,5ìì. ì = 16,5ìì.
Ñïèñîê
ëèòåðàòóðû
1. Правила устройства и
безопасной эксплуатации строительных подъемников ПБ 10 – 518 – 02. Сер. 10.
Вып. 23 / Коллектив. авт. – М.: Государственное унитарное предприятие
«Научно–технический центр по безопасности в промышленности Госгорнтехнадзора
России», 2003. – 104 с.
2. Федорова З.М. и др.
Подъемники. Киев: Высшая школа. 1976. – 294с.
3. Галиченко А.Н., Гехт
А.Х. Строительные грузовые и грузопассажирские подъемники.- М.: - Высшая школа.
1989. - 255 с.
4. Павлов Н.Г. Лифты и
подъемники. М.; - Л.: Машиностроение. - 1965. - 201 с.
5. Вайнсон А.А.
Подъемно-транспортные машины строительной промышленности: Атлас. – М.:
Машиностроение. – 1976. – 151 с.
6. Желтонога А.И. и др
Краны и подъемники: Атлас Ч. II. Минск: Высшая школа, 94 с.
7. Поляков В.И. и др.
Машины для монтажных работ и вертикального транспорта. - М.: Стройиздат, 1981.
- 350 с.
8. Чернышов Р.О.
Подъемники и легкие краны в строительстве. - М.: Стройиэдат, 1975. - 286 с.
9. Федосеев В.Н.,
Гончаров Г.И. Безопасная эксплуатация лифтов. Справочное пособие. - М.:
Стройиздат. 1987. - 253 с.
10. Лифты: Учебник для
вузов/ под общей ред. Д.П. Волкова – М.: изд-во АСВ, 1999. – 480 с.
11. Баранов А.П.,
Голутвин В.А. Подъемники. – Тула: изд-во ТулГУ, 2004. – 150 с.
12. Справочник по кранам,
под ред. М.М.Гохберга. Л.: Машиностроение, 1988. 535 с.
|